
Page 21 - หนังสือเรียนเทคโนโลยี (การออกแบบและเทคโนโลยี) ม.4
P. 21
G G P A1 A2 S
P
21
2. ระบบควบคุมแบบวงปิด (Close-loop Control System)
ี
ในการออกแบบสร้างเทคโนโลยีท่มีความซับซ้อน เทคโนโลยีท่เกี่ยวข้องกับความปลอดภัย
ี
้
ู
ี
ของผ้ใช เกี่ยวข้องกับมวลชน ต้องมีการทํางานของระบบตรวจสอบท่มีประสิทธิภาพมากขึ้น ทําให ้
เคร่องมือท่ทํางานสามารถทํางานได้ยืดหยุ่นมากข้น โดยระบบควบคุมแบบวงปิดนี การเก็บข้อมูล
ื
้
ี
ึ
ื
ั
ย้อนกลับ (Feedback) เพ่อตรวจสอบ บางคร้งอาจเรียกว่า ระบบควบคุมแบบย้อนกลับ (Feedback
ึ
ิ
Control System) ซ่งเป็นกระบวนการทํางานท่ถูกเพ่มเข้าไปเมื่อมีการกระต้น เพ่อตรวจสอบหรือ
ุ
ื
ี
ื
ํ
้
่
่
ี
ิ
ุ
ิ
ั
ตรวจจบขอมูลทกด้านทเกียวของ นามาประมวลค่าความผดพลาด เพอตดสนสังงานในกระบวนการ
่
้
่
ั
ทํางานทางเทคโนโลยีให้มีประสิทธิภาพที่สุด
กระบวนการทํางานแบบนี้มีข้อดี คือ
1. กําจัดอุปสรรคที่รบกวนได้
2. รับประกันความสําเร็จได้มากกว่าระบบควบคุมแบบวงเปิด
3. สามารถนําไปใช้ในสถานการณ์ที่ธรรมชาติของการนําเข้าไม่คงที่
ื
ระบบควบคุมแบบวงปิด อาจจะใช้กลไกหรือระบบอิเล็กทรอนิกส์เซนเซอร์มาทํางานเพ่อ
ให้ได้ข้อมูลส่งสัญญาณย้อนกลับมาตรวจสอบ และปรับพฤติกรรมการทํางานให้เหมาะสมกับสถานการณ์
ให้มากที่สุด
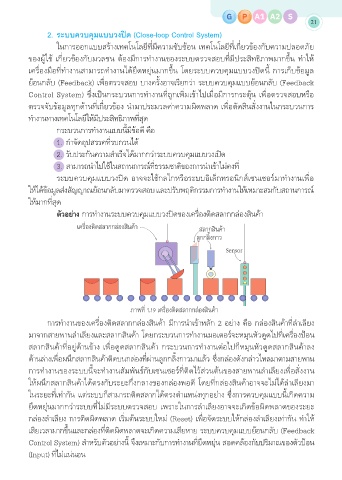
ตัวอย่าง การทํางานระบบควบคุมแบบวงปิดของเครื่องติดสลากกล่องสินค้า
เครื่องติดสลากกล่องสินค้า สลากสินค้า
ลูกกลิ้งกาว
Sensor
ภาพที่ 1.19 เครื่องติดสลากกล่องสินค้า
ี
ื
การทํางานของเคร่องติดสลากกล่องสินค้า มีการนําเข้าหลัก 2 อย่าง คือ กล่องสินค้าท่ลําเลียง
ี
มาจากสายพานลําเลียงและสลากสินค้า โดยกระบวนการทํางานมอเตอร์จะหมุนหัวดูดไปท่เคร่องป้อน
ื
่
่
ํ
ี
สลากสนค้าทอยูด้านขาง เพอดูดสลากสินค้า กระบวนการทางานตอไปก็หมุนหวดูดสลากสินค้าลง
ั
ิ
่
้
ื
่
ื
ี
ึ
ิ
ด้านล่างเพ่อผนึกสลากสินค้าติดบนกล่องท่ผ่านลูกกล้งกาวมาแล้ว ซ่งกล่องดังกล่าวไหลมาตามสายพาน
ื
ี
การทํางานของระบบนี้จะทํางานสัมพันธ์กับเซนเซอร์ท่ติดไว้ส่วนต้นของสายพานลําเลียงเพ่อสั่งงาน
ให้ผนึกสลากสินค้าได้ตรงกับระยะกึ่งกลางของกล่องพอดี โดยท่กล่องสินค้าอาจจะไม่ได้ลําเลียงมา
ี
ในระยะท่เท่ากัน แต่ระบบก็สามารถติดสลากได้ตรงตําแหน่งทุกอย่าง ซ่งการควบคุมแบบนี้เกิดความ
ี
ึ
ี
ยืดหยุ่นมากกว่าระบบท่ไม่มีระบบตรวจสอบ เพราะในการลําเลียงอาจจะเกิดข้อผิดพลาดของระยะ
ื
ิ
กล่องลําเลียง การติดผิดพลาด เร่มต้นระบบใหม่ (Reset) เพ่อจัดระบบให้กล่องลําเลียงเท่ากัน ทําให ้
ิ
ิ
้
ี
ั
เสียเวลามากขึนและกล่องท่ตดผดพลาดจะเกิดความเสียหาย ระบบควบคุมแบบย้อนกลบ (Feedback
Control System) สําหรับตัวอย่างนี้ จึงเหมาะกับการทํางานที่ยืดหยุ่น สอดคล้องกับปริมาณของตัวป้อน
(Input) ที่ไม่แน่นอน